Projects
Achieving Adaptive Impedance Control for Autonomous Aerial Manipulation under Unknown Dynamics (TMECH Under Review)
- Bab Sak Robotic Intubation System (BRIS): A Novel Endotracheal Intubation System with an Integrated Monocular Carinal Measurement Module (link) (Manuscript Link(IEEE IROS 2025))
- A Switched Adaptive Control Framework for Aerial Manipulators Under Dynamic Transitions (Video link) (TRO Under Review)
- Impedance and Stability Targeted Adaptation forAerial Manipulator with Unknown Coupling Dynamics (Video link) (Manuscript Link(Under Review - IROS 2025))
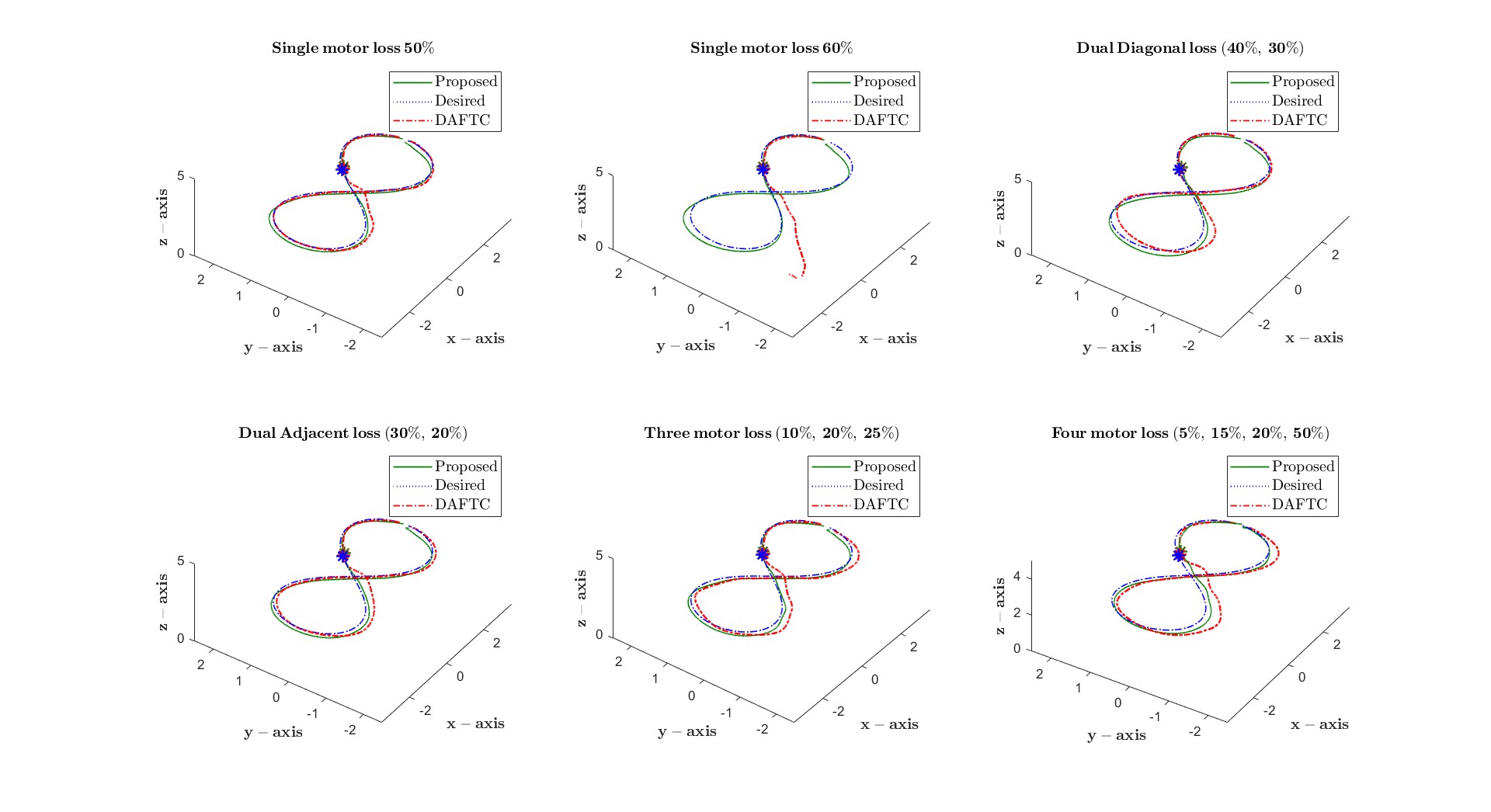
- Adaptive Control of Quadrotor under Actuator Loss and Unknown State-dependent Dynamics(Manuscript Link(IEEE CASE 2024)) *S. Gupta, A. Sharma, A. Mulgundkar, R. D. Yadav and S. Roy, “Adaptive Control of Quadrotor under Actuator Loss and Unknown State-dependent Dynamics,” 2024 IEEE 20th International Conference on Automation Science and Engineering (CASE), Bari, Italy, 2024, pp. 717-722, doi: 10.1109/CASE59546.2024.10711418.
- An Integrated Approach to Aerial Grasping:Combining a Bistable Gripper with Adaptive Control (Video link) (Manuscript Link(Under Review - TMECH))
- Drone Pollination for paddy crops(Commercialized) (link)
- Adaptive Fault Tolerant Control of a Hexacopter UAV (link)
- SEA based aerial manipulator (link)
- Series Elastic Actuator (SEA) based aerial manipulator is used for shock absorbance during the hammering
- Intelligent (Environment Aware) Autonomous Vehicle,
- for IGVC (Intelligent Ground Vehicle Competition), organized by RoboNation
- Aug 2019 – Jun 2020 *Annual international competition held at Rochester Institute of Technology where multiple teams of multi-disciplinary nature compete to build an autonomous vehicle according to a fixed set of rules to compete on various grounds.
- Led a team of 20+ students; oversaw all major aspects of the product’s (robot’s) development from manufacturing to electronics to computer programming.
- Developed a fully compliant all-terrain vehicle for autonomous motion tracking; path planning & traversal.

- An open, easily replicable & modular design for a regenerative aqua pump,
- Final Year Undergraduate Project
- Jul 2019 – Apr 2020
- An innovative project to design and build non-electric treadle like water pumps that instead of using electricity, generates battery power thus tackling the vexed water-energy-nexus challenge. Donated it to a rural municipal corporation in India.
- Designed an open-hardware system using commercial off the shelf components (COTS); which can be easily replicated at scale.
- Developed a modular water pump - can be connected to any bicycle & used for generating electricity & for pumping water at the same time from a well.
- Achieved a low cost - high ROI (with one-time CAPEX) by designing a product with eco-friendly; readily-available & economic components.
- An innovative project to design and build non-electric treadle like water pumps that instead of using electricity, generates battery power thus tackling the vexed water-energy-nexus challenge. Donated it to a rural municipal corporation in India.
- NMIMS Robotics Testbed - 1 (NRT-1), a satellite payload,
- Manufacturing Engineer
- Oct 2019 – Feb 2020
- A pilot project to study the behaviour of Magnetic Shape Memory Alloy in space.
- Oranganized by ISRO (the Indian Space Research Organization); under its SpaceShare program - about 8-9 applications were finalized from a pool of thousands of research proposals (which included top Indian Institutes).
- Designed and manufactured a test-bed for a Terfenol-D (magnetostrictive material) in space. The project deliverable is a payload; set to launch on an upcoming PSLV rocket (in Q3 2022).
- Lead design & manufacturing of a highly constrained payload (constrained by space, dimensions, weight & scale of components attached).
- Performed various regression & stress tests on the payload - thermovac, vibrations, signal encryption & attenuation in Class 1 clean rooms.
- Singapore Autonomous Underwater Vehicle Challenge 2018 & 2019,
- Jun 2017 – Jul 2019
- Annual Robotics Challenge organized by the IEEE OES (Oceanic Engineering Society).
- Led a team of 12 students; for designing, manufacturing & building an underwater autonomous vehicle.
- The team won numerous accolades - stood 4th amongst 45 international teams in 2018; stood 7th amongst 57 international teams in 2019; bagged the Social Media Prize in 2019.
- Designed a modular, component-based AUV system for performing a multitude of tasks - SLAM based navigation & planning; visual identification of key zones/areas in the robot vicinity; acoustics (hydrophones, DVL) based localization & performing various decommissioning tasks with the help of a 6-DOF robotic arm.



- Annual Robotics Challenge organized by the IEEE OES (Oceanic Engineering Society).
- Jun 2017 – Jul 2019
- Student race car with a carbon fiber chassis, Formula Bharat (India) 2017
- Aug 2016 – Jul 2017
- National student racing competition (F1-style) where hundreds of national-level teams participate to compete over various grounds.
- The first foray into building intelligent vehicles (products) - developed an understanding of all technical aspects such as racing car vehicle dynamics, aerodynamics, impact attenuation, fatigue testing, designing parts at micro-scale & integrating at the macro (systems engineering), design of exhausts, steering, suspensions, etc.

- The first foray into building intelligent vehicles (products) - developed an understanding of all technical aspects such as racing car vehicle dynamics, aerodynamics, impact attenuation, fatigue testing, designing parts at micro-scale & integrating at the macro (systems engineering), design of exhausts, steering, suspensions, etc.
- National student racing competition (F1-style) where hundreds of national-level teams participate to compete over various grounds.
- Aug 2016 – Jul 2017
- Soft Robotic Pneumatic Arm,
- for Undergraduate Course - Electro Mechanical Workshop Project
- Designed & manufactured a soft robotics gripper that can grab protean shapes.
- Arm was based on a simple bio-mimetic principle - three tentacle based gripping.
- for Undergraduate Course - Electro Mechanical Workshop Project