S. Gupta*, S. Mishra*, A. Ayub, K. Farooque, S. Roy, and B. Gupta, “Bab_Sak Robotic Intubation System (BRIS):A Learning-Enabled Control Framework for Safe Fiberoptic Endotracheal Intubation”IEEE Robotics and Automation Letters (RA-L), under review. (Video link) (Manuscript Link) (Project Website)
S. Mishra*, R. D. Yadav*, A. Das, S. Gupta, W. Pan, and S. Roy, “AERMANI-VLM: Structured Prompting and Reasoning for Aerial Manipulation with Vision-Language Models,” IEEE Robotics and Automation Letters (RA-L), under review. (Project Website)
S. Gupta*, R. D. Yadav*, A. Sharma, S. Roy, S. Baldi, and W. Pan, “A switched adaptive control framework for aerial manipulators under dynamic transitions,” IEEE Transactions on Robotics, under review. (Manuscript Link) (Video link)
A. Sharma*, S. Gupta*, R. D. Yadav, W. Pan, S. Roy, and S. Baldi, “Achieving adaptive impedance control for autonomous aerial manipulation under unknown dynamics,” IEEE/ASME Transactions on Mechatronics, under review. (Manuscript Link)
A. Sharma, S. Gupta, S. P. Singh, R. D. Yadav, H. Song, W. Pan, S. Roy, and S. Baldi, “Impedance and stability targeted adaptation for aerial manipulator with unknown coupling dynamics,” IEEE International Conference on Control, Automation and Systems (ICCAS), Accepted(preprint). (Video link) (Manuscript Link)
II. Published
R. D. Yadav*, B. Jones*, S. Gupta*, A. Sharma, J. Sun, S. Roy, and J. Zhao, “An integrated approach to aerial grasping: Combining a bistable gripper with adaptive control,” IEEE/ASME Transactions on Mechatronics, https://doi.org/10.1109/TMECH.2025.3586888. (Video link) (Manuscript Link)
S. Gupta, A. Sharma, A. Mulgundkar, R. D. Yadav, and S. Roy, “Adaptive Control of Quadrotor under Actuator Loss and Unknown State-dependent Dynamics,” 2024 IEEE 20th International Conference on Automation Science and Engineering (CASE), Bari, Italy, 2024, pp. 717–722. doi: 10.1109/CASE59546.2024.10711418 (Manuscript Link)
III. Workshops
S. Gupta*, S. Mishra*, A. Ayub, K. Farooque, S. Roy, and B. Gupta, “Bab Sak Robotic Intubation System (BRIS): A Novel Endotracheal Intubation System with an Integrated Monocular Carinal Measurement Module”, 1st International Workshop on the Evolving Landscape of Surgical Robotics (ELSR 2025): Towards AI-Powered Unconventional Instruments and Technologies in the Operating Theatre, IEEE International Conference on Robotics and Automation (ICRA), Atlanta, United States. Workshop Website
IV. Projects
Drone Pollination for paddy crops(Commercialized) (link)
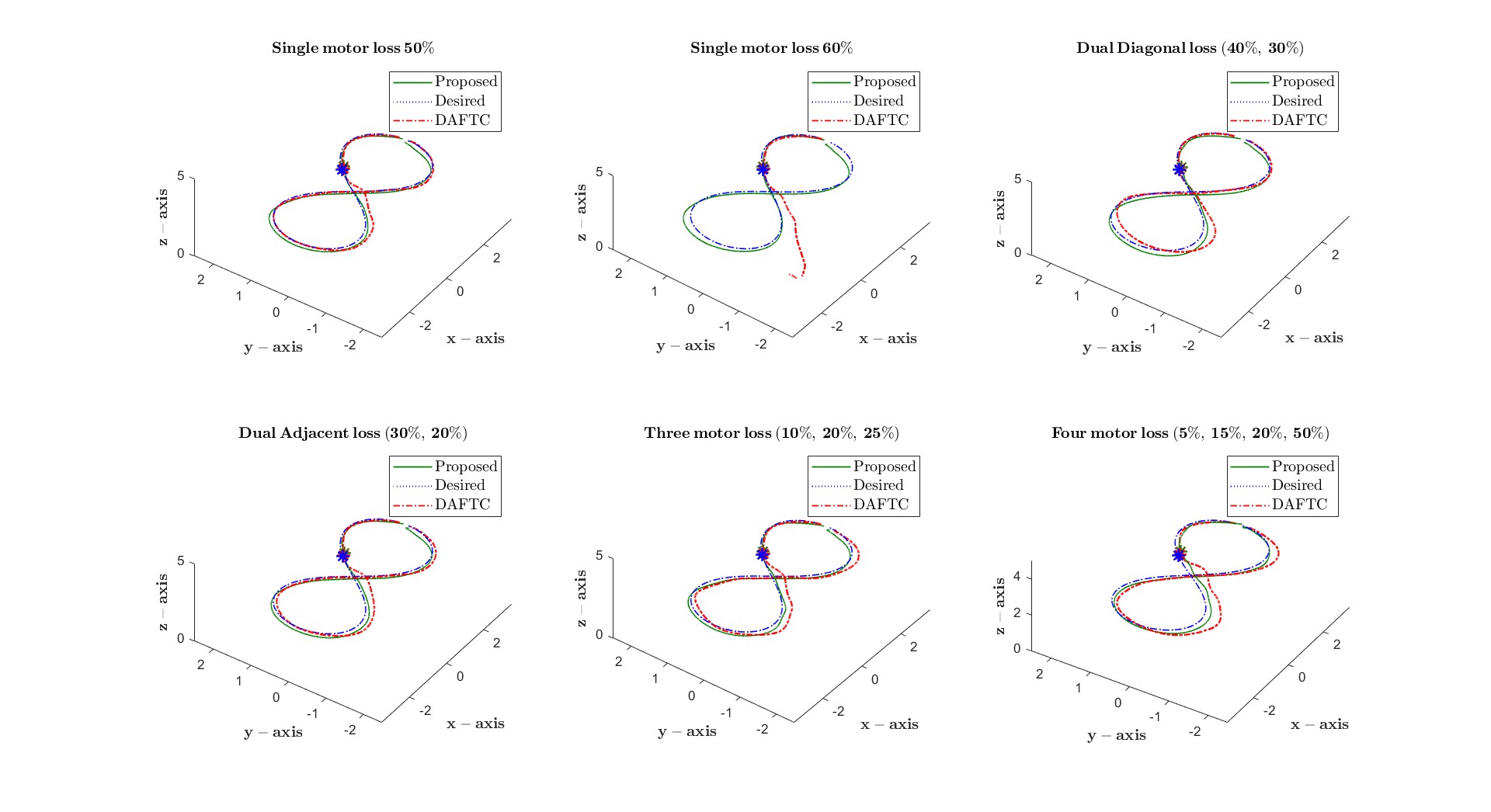
Adaptive Fault Tolerant Control of a Hexacopter UAV (link)
for IGVC (Intelligent Ground Vehicle Competition), organized by RoboNation
Aug 2019 – Jun 2020 *Annual international competition held at Rochester Institute of Technology where multiple teams of multi-disciplinary nature compete to build an autonomous vehicle according to a fixed set of rules to compete on various grounds.
Led a team of 20+ students; oversaw all major aspects of the product’s (robot’s) development from manufacturing to electronics to computer programming.
Developed a fully compliant all-terrain vehicle for autonomous motion tracking; path planning & traversal.
An open, easily replicable & modular design for a regenerative aqua pump,
Final Year Undergraduate Project
Jul 2019 – Apr 2020
An innovative project to design and build non-electric treadle like water pumps that instead of using electricity, generates battery power thus tackling the vexed water-energy-nexus challenge. Donated it to a rural municipal corporation in India.
Designed an open-hardware system using commercial off the shelf components (COTS); which can be easily replicated at scale.
Developed a modular water pump - can be connected to any bicycle & used for generating electricity & for pumping water at the same time from a well.
Achieved a low cost - high ROI (with one-time CAPEX) by designing a product with eco-friendly; readily-available & economic components.
NMIMS Robotics Testbed - 1 (NRT-1), a satellite payload,
Manufacturing Engineer
Oct 2019 – Feb 2020
A pilot project to study the behaviour of Magnetic Shape Memory Alloy in space.
Oranganized by ISRO (the Indian Space Research Organization); under its SpaceShare program - about 8-9 applications were finalized from a pool of thousands of research proposals (which included top Indian Institutes).
Designed and manufactured a test-bed for a Terfenol-D (magnetostrictive material) in space. The project deliverable is a payload; set to launch on an upcoming PSLV rocket (in Q3 2022).
Lead design & manufacturing of a highly constrained payload (constrained by space, dimensions, weight & scale of components attached).
Performed various regression & stress tests on the payload - thermovac, vibrations, signal encryption & attenuation in Class 1 clean rooms.
Annual Robotics Challenge organized by the IEEE OES (Oceanic Engineering Society).
Led a team of 12 students; for designing, manufacturing & building an underwater autonomous vehicle.
The team won numerous accolades - stood 4th amongst 45 international teams in 2018; stood 7th amongst 57 international teams in 2019; bagged the Social Media Prize in 2019.
Designed a modular, component-based AUV system for performing a multitude of tasks - SLAM based navigation & planning; visual identification of key zones/areas in the robot vicinity; acoustics (hydrophones, DVL) based localization & performing various decommissioning tasks with the help of a 6-DOF robotic arm.
Student race car with a carbon fiber chassis, Formula Bharat (India) 2017
Aug 2016 – Jul 2017
National student racing competition (F1-style) where hundreds of national-level teams participate to compete over various grounds.
The first foray into building intelligent vehicles (products) - developed an understanding of all technical aspects such as racing car vehicle dynamics, aerodynamics, impact attenuation, fatigue testing, designing parts at micro-scale & integrating at the macro (systems engineering), design of exhausts, steering, suspensions, etc.
Soft Robotic Pneumatic Arm,
for Undergraduate Course - Electro Mechanical Workshop Project
Designed & manufactured a soft robotics gripper that can grab protean shapes.
Arm was based on a simple bio-mimetic principle - three tentacle based gripping.